Autonome Mobilität stärken mit dem Vantron AGV/AMR-Controller
2026/04/16
Da Fabriken verstärkt auf intelligente Produktion und Logistik setzen, sind mobile Roboter für den modernen Materialfluss unverzichtbar geworden. Seit der Einführung des ersten fahrerlosen Transportsystems (FTS/AGV) im Jahr 1953 haben sich radbasierte autonome Systeme von einfachen spurgeführten Fahrzeugen zu hochgradig adaptiven Robotern entwickelt, die in Echtzeit Entscheidungen treffen können. Der Aufstieg autonomer mobiler Roboter (AMR) markiert einen bedeutenden Sprung von der Navigation auf festen Pfaden hin zu einer dynamischen, situationsbewussten Mobilität.
In diesem Artikel untersuchen wir die Unterschiede zwischen AGVs und AMRs und erläutern, wie die Controller-Hardware von Vantron eine sichere, zuverlässige und kosteneffiziente autonome Mobilität ermöglicht. Darüber hinaus illustrieren wir anhand eines Praxisbeispiels, wie Leistung und Systemkosten durch die richtige Controller-Plattform signifikant optimiert werden können.
Was ist ein AGV/AMR?
Traditionelle AGVs folgen vordefinierten Routen, die durch Magnetstreifen, QR-Codes, Reflektoren oder elektromagnetische Spuren geführt werden. Jede Routenänderung erfordert eine physische Anpassung der Umgebung, wodurch AGVs zwar für vorhersehbare Arbeitsabläufe geeignet, aber in ihrer Flexibilität eingeschränkt sind.
AMRs hingegen verlassen sich auf Multi-Sensor-SLAM – eine Integration von LiDAR, Kameras, IMUs und Tiefenwahrnehmung –, um Echtzeit-Karten zu erstellen und autonom zu navigieren. Dank KI-gestützter Pfadplanung und dynamischer Hindernisumgehung wählen AMRs kontinuierlich die effizienteste Route und passen sich sofort an ihre Umgebung an. Dies macht sie ideal für den 24/7-Einsatz in komplexen, dynamischen Umgebungen.
AGV/AMR-Systeme lassen sich generell in drei Leistungsstufen unterteilen:
- Einstiegsklasse: Einfache Algorithmen zur Hindernisumgehung und monokulares vSLAM für Punkt-zu-Punkt-Aufgaben.
- Mittelklasse: Binokulare Bildverarbeitung oder fortgeschrittenes vSLAM für eine stärkere Wahrnehmung und intelligente Planung.
- Oberklasse: Hochleistungs-Industrierechner, die Daten von Laserradar, Industriekameras und Millimeterwellen-Sensoren fusionieren. Die Antriebsmodule sind via TSN, CANopen oder EtherCAT integriert, um eine präzise und latenzarme Bewegungssteuerung zu gewährleisten.
Vantrons AGV/AMR-Controller: Entwickelt für Einsteiger- und Mittelklasse-Mobilität
Mit zwei Jahrzehnten Erfahrung im Bereich industrielles IoT und Robotik hat Vantron einen robusten Standard-Controller speziell für AGV- und AMR-Hersteller entwickelt. Der VT-AGV-3588J ist für mobile Roboter optimiert, die starke Rechenleistung, Echtzeit-Reaktionsfähigkeit und Kosteneffizienz benötigen.
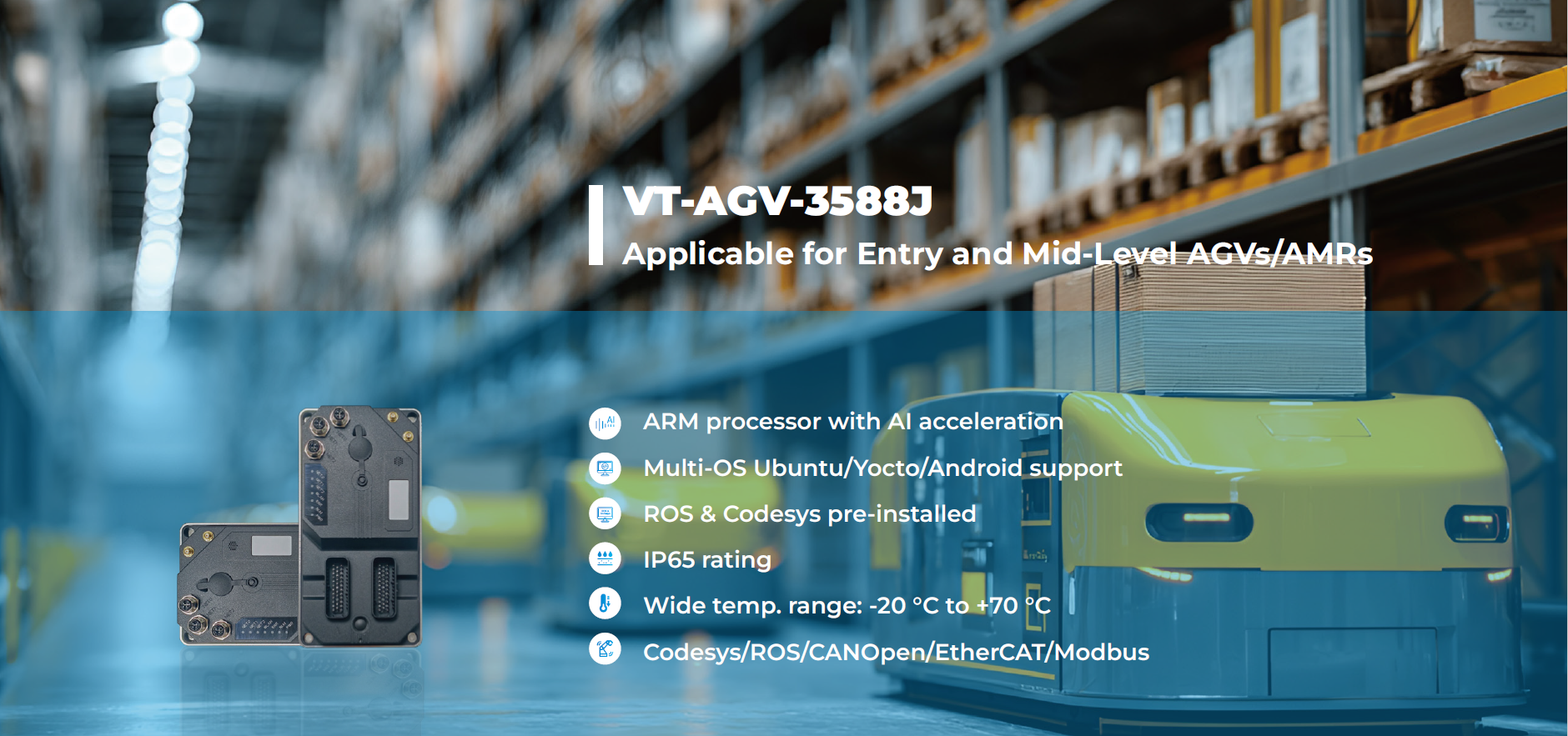
Basierend auf dem ARM-Prozessor RK3588J mit 16 GB RAM und 128 GB Speicher bewältigt der Controller mühelos Multi-Sensor-Fusion, SLAM-Berechnungen und Navigationsaufgaben. Die integrierte Echtzeit-MCU garantiert eine deterministische Bewegungssteuerung und ermöglicht die schnelle Ausführung von Navigations- und Sicherheitsbefehlen. Dank der Unterstützung zahlreicher I/O-Schnittstellen lässt sich der Controller nahtlos in Kameras, LiDAR und Motorsteuerungen integrieren. Mit vorinstallierter CODESYS Runtime und ROS 2-Kompatibilität können Entwickler Navigations- und Steuerungsfunktionen schnell für verschiedene Szenarien bereitstellen.
Um harten Industriebedingungen standzuhalten, verfügt der Controller über M12-Ethernet-Anschlüsse, ein IP65-Gehäuse und einen erweiterten Betriebstemperaturbereich von –20 °C bis +70 °C.
Praxiserfolg: Kostenoptimierter AGV/AMR-Controller
Ein Robotik-Hersteller in Malaysia, spezialisiert auf AGV- und AMR-Systeme, stand vor Herausforderungen mit seinen bisherigen X86-basierten Controllern. Diese waren für einfache Anwendungsszenarien zu kostspielig und schränkten die Skalierbarkeit in preissensiblen Märkten ein. Der Kunde suchte nach einer ARM-basierten Alternative mit ROS 2-Unterstützung, Sicherheits-I/O-Erweiterung und zuverlässiger Echtzeitsteuerung.
Vantron lieferte den VT-AGV-3588J als Ersatzlösung, die eine starke Rechenleistung bei deutlich geringeren Kosten bietet. Da der Controller auf Ubuntu 22.04 basiert und ROS 2 nahtlos unterstützt, konnte das Engineering-Team die Entwicklung ohne größere Software-Anpassungen fortsetzen. Vantron integrierte zudem eine STM32-MCU für deterministische Steuerung und vielfältige I/Os zur Anbindung von SICK-Sicherheitskomponenten.

Mit dem Vantron-Controller konnte der Kunde erfolgreich eine neue Linie kosteneffizienter AGVs und AMRs auf den Markt bringen. Die Plattform reduzierte die Gesamtsystemkosten im Vergleich zu X86-Designs erheblich, während Leistung, Sicherheit und Skalierbarkeit gewahrt blieben.
Fazit
AGVs und AMRs sind Schlüsselfaktoren für moderne Smart Factories und die digitale Logistik. Ihre Leistung hängt maßgeblich von der Zuverlässigkeit der Controller-Hardware ab. Die Plattform von Vantron bietet ein leistungsstarkes und kostenoptimiertes Fundament für mobile Roboter der nächsten Generation.
Bereit, Ihre AGV/AMR-Entwicklung zu beschleunigen?
Kontaktieren Sie Vantron noch heute oder besuchen Sie uns auf der SPS 2025 in Deutschland (Halle 10, Stand 510), um unsere Lösungen live zu erleben.


Vantrons umfassender Service erfüllt alle komplexen Anfragen.



